เจาะลึก PM2.5 Data Integrity: วิธีแก้ปัญหาค่าฝุ่นเพี้ยนจากความชื้น และการบำรุงรักษา PMS7003
ในการทำระบบวัดคุณภาพอากาศ ปัญหาที่น่าปวดหัวที่สุดไม่ใช่การทำให้เครื่องทำงานได้ แต่คือ "ความน่าเชื่อถือของข้อมูล" หลายครั้งที่เราพบว่าค่าฝุ่นพุ่งสูงผิดปกติในช่วงฝนตกหรือตอนเช้ามืด ทั้งที่ไม่มีแหล่งกำเนิดควัน บทความนี้จะพาทุกคนไปดูสาเหตุเชิงลึกและแนวทางการแก้ไขแบบมืออาชีพ
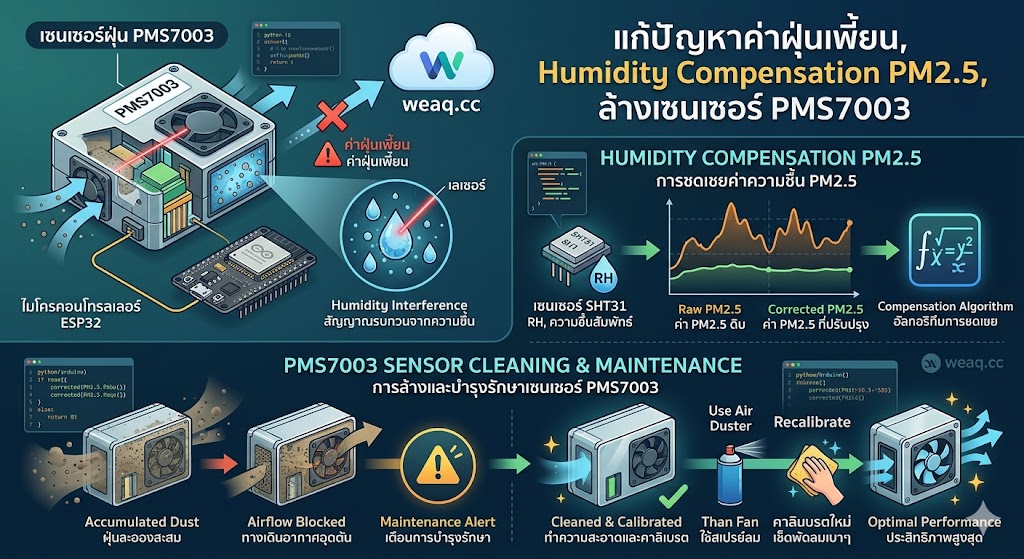
1. ปัญหา Humidity Interference: เมื่อละอองน้ำ "ปลอมตัว" เป็นฝุ่น
เซนเซอร์ตระกูล PMS7003 ใช้หลักการ Laser Scattering (การกระเจิงของแสงเลเซอร์) เพื่อตรวจจับอนุภาค เมื่ออากาศมีความชื้นสัมพัทธ์ (RH) สูงกว่า 70-80% ละอองไอน้ำในอากาศจะเริ่มรวมตัวกันจนมีขนาดใหญ่พอที่จะสะท้อนแสงเลเซอร์ ทำให้เซนเซอร์เข้าใจผิดว่ามันคือฝุ่น PM2.5
วิธีแก้ด้วย Humidity Compensation Algorithm
เราสามารถใช้ค่าจากเซนเซอร์ SHT31 มาคำนวณเพื่อ "ทอน" ค่าฝุ่นที่เกินจริงออกไปได้ โดยใช้สมการยอดนิยมอย่าง Corrected PM = Raw PM / (1 + a * (RH^b / (100 - RH))) หรือใช้ Logic พื้นฐานดังนี้:
- RH < 60%: ค่าฝุ่นเชื่อถือได้ 100%
- RH 60-80%: เริ่มมีการเบี่ยงเบนเล็กน้อย (ควรเริ่มใช้ตัวคูณลดทอน)
- RH > 85%: ค่าฝุ่นมักจะสูงเกินจริงไป 1.5 - 2 เท่า (ต้องใช้ Algorithm ชดเชย)
2. ปัญหา Dust Accumulation (ฝุ่นเกาะในห้องเครื่อง)
แม้ PMS7003 จะมีพัดลมในตัว แต่เมื่อใช้งานไป 6-12 เดือน ฝุ่นละอองขนาดใหญ่ (PM10) หรือใยแมงมุมอาจเข้าไปสะสมภายใน ทำให้:
- Airflow ลดลง: พัดลมหมุนช้าลงหรือดึงอากาศเข้าได้น้อยลง
- Scatter Error: ฝุ่นที่เกาะอยู่หน้าเลเซอร์ทำให้เกิดค่า "Base" ค้างอยู่ตลอดเวลา (เช่น ค่าไม่เคยต่ำกว่า 10 เลยแม้ในห้องสะอาด)
3. ขั้นตอนการซ่อมบำรุง (Maintenance Guide)
การล้างเซนเซอร์ PMS7003 อย่างถูกวิธี
ข้อควรระวัง: ห้ามใช้คอตตอนบัดแหย่เข้าไปในรูเซนเซอร์เด็ดขาด เพราะเลนส์เลเซอร์มีความละเอียดอ่อนมาก
- ใช้สเปรย์ลมแห้ง (Dry Air/Air Duster): ฉีดอัดเข้าไปในช่องทางเข้าอากาศ (Air Inlet) และทางออก (Outlet) เพื่อไล่ฝุ่นสะสม
- ตรวจสอบความเร็วพัดลม: หากได้ยินเสียงพัดลมดังผิดปกติหรือมีเสียงแหลม แสดงว่าแบริ่งเริ่มเสื่อมสภาพ ควรพิจารณาเปลี่ยนตัวใหม่
- การทำความสะอาดกล่อง Enclosure: เช็ดคราบแมลงหรือฝุ่นที่รูระบายอากาศของกล่องใส่อุปกรณ์ให้สะอาด เพื่อให้อากาศไหลเวียนได้สะดวก
4. Software Filtering: ลด Noise ให้กราฟสวยและแม่นยำ
นอกจากการแก้ทางฮาร์ดแวร์ การใช้ Digital Filter ใน Code ESP32 จะช่วยให้ข้อมูลนิ่งขึ้นมาก:
- Simple Moving Average (SMA): เก็บค่า 10-20 ค่าล่าสุดแล้วหาค่าเฉลี่ย เพื่อตัดค่าที่กระโดด (Spikes) ชั่วคราวออก
- Median Filter: เหมาะสำหรับตัดค่า Error ที่หลุดมาเป็นค่าโดดๆ (Outliers)
// ตัวอย่างแนวคิด Moving Average แบบง่าย
float updateAverage(float newValue) {
static float values[10];
static int index = 0;
values[index] = newValue;
index = (index + 1) % 10;
float sum = 0;
for(int i=0; i<10; i++) sum += values[i];
return sum / 10;
}สรุปบทความ
ข้อมูลที่มีคุณภาพเกิดจาก "เซนเซอร์ที่สะอาด + การคำนวณที่แม่นยำ" การเลือกใช้ SHT31 คู่กับ PMS7003 ถือเป็นจุดเริ่มต้นที่ดีมาก เพราะทำให้มีข้อมูลความชื้นมาใช้ในการทำ Compensation เพื่อส่งต่อข้อมูลที่ถูกต้องที่สุดให้กับผู้ใช้งาน
- Keywords: แก้ปัญหา PMS7003, PM2.5 ความชื้น, Humidity Compensation, ล้างเซนเซอร์ฝุ่น, IoT Troubleshooting